

In the era of the Internet of Things, and 5G technology, major innovations using these technologies in the field of multimodal traffic and transportation systems are expected. These innovations are geared to make the mobility system greener, safer, fair, more efficient and in the end cheaper. In this project, we will focus on a specific case, namely multimodal intersection control using connected vehicles and 5G technology.
The general idea is that the performance of a vehicle or traffic actuated intersection controller can be improved by using advanced sensing and communication technology in two ways: one by using better data (higher quality, more suitable data semantics, etc.), and two by tuning the algorithm by using feedback on the performance of the intersection controller. 5G technology makes such functionality possible.
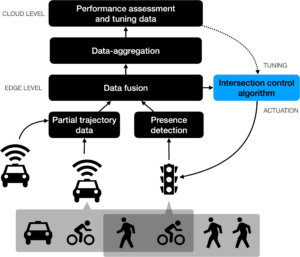
The figure provides an overview of the proposed multi-layer approach. Let us briefly explain the different elements of the proposed scheme.
 The data that the adaptive intersection controller uses stems from the traditional sensor systems that are currently used (e.g. inductive loops, presence detectors, pushbuttons) to detect cars, trucks, cyclists and pedestrians. We furthermore assume that there are connected vehicles equipped with varying types of sensors, sharing (some) of these data with the proposed system. Additional high-end sensors (e.g. radar) can be added to the system.
The data that the adaptive intersection controller uses stems from the traditional sensor systems that are currently used (e.g. inductive loops, presence detectors, pushbuttons) to detect cars, trucks, cyclists and pedestrians. We furthermore assume that there are connected vehicles equipped with varying types of sensors, sharing (some) of these data with the proposed system. Additional high-end sensors (e.g. radar) can be added to the system.
At the edge level, the most detailed data is available. These data consist of the data from the controlled intersection, and the additional data from the connected vehicles (involving for instance partial trajectories of other cars, pedestrians, cyclists). The data are optimally combined using a data fusion algorithm, best satisfying the data requirements of the intersection control algorithm. The fused data are sent to the control algorithm, that determines the control signal for the intersection controller and possibly to the connected vehicles (fast feedback loop). The data are further aggregated and pushed to the historic database (i.e. the cloud), to be used for intersection control performance assessment and improvement (slow or adaptive feedback loop). Note that the data sharing architecture is based on the concept of data minimization: only these data are pushed to a higher layer (or an application) if this is needed (and secure).
The research in this project entails the development of the system architecture (based on Fig. 1), the development of the data fusion algorithm, the development of the intersection control algorithm, and the assessment of the system using microscopic simulation.
For more information contact Sascha Hoogendoorn-Lanser (S.Hoogendoorn-Lanser@tudelft.nl)
Partners: TU Delft
Status: ongoing